



《机电一体化系统创新设计实验》教案
【添加时间:2015-07-30 21:20:37】【来源:】【作者:uestcetcmce】【阅读:】
实验一 慧鱼机构拼接与方案设计实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 机电一体化系统的基本构成;
2) 慧鱼构件的种类及应用。
3) “马达驱动的转台”的搭建。
4) 讲解各个命题的目标和要求。
5) 机械设计的步骤和总体结构原理图的绘制方法。
2、 所需实验器材及配置:
1) 慧鱼构件若干;
2) 安装有 CAD 设计软件的计算机 1 台。
3、 讲解实验步骤:
1) 熟悉慧鱼构件及其组装方法。
2) 使用慧鱼构件搭建一个简单的模型,对机电一体化产品形成概念。
3) 以组(3~5 人/组)为单位,自由选择命题。
4) 根据命题给出的要求,设计相应的原理方案。
(二)教学要求
1、 了解机电一体化设备的基本构成;
2、 掌握各种慧鱼构件的使用方法;
3、 熟悉使用多种几何元件拼装部件的过程。
二、教学重点、难点
(一)教学重点
1、 机械装置的设计步骤。
根据目标要求, 进行功能原理设计; 确定结构原理方案, 进行总体技术设计;具体结构设计;工艺设计。
2、 慧鱼构件的种类。
慧鱼构件包括了:齿轮、齿条、连杆、链条、履带、蜗轮、蜗杆、曲轴、齿轮箱及构筑零件、储气罐、压缩气缸、气管、气管联接头、弹簧等。
(二)教学难点
1、 机电一体化系统的基本构成。
机电一体化系统一般包括以下要素: 机械本体、 动力与驱动部分、 执行机构、传感器、控制及信息处理部分,如下图所示:
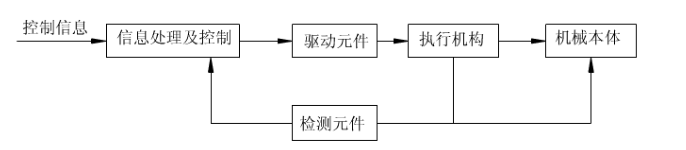
机电一体化系统组成
三、作业
完成实验报告。
四、参考资料
1、 《 “机电一体化系统创新设计实验”指导书》 ,自编
五、教学后记
实验二 模型机构搭建实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 机构模型的搭建。
2) 机械结构的调试和优化。
2、 所需实验器材及配置:
1) 慧鱼构件若干。
3、 讲解实验步骤:
1) 根据所先命题给出的要求,搭建相应的机构模型。
2) 对机械结构进行调试和优化。
(二)教学要求
1、 了解机械创新设计的过程;
2、 熟悉常用机械构件的种类和使用方法;
3、 熟悉典型传动机构原理及现实方法。
二、教学重点、难点
(一)教学重点
1、 机电设备原理方案的实现。
应进行模块化设计,根据原理方案先搭建各基本模块,实现其基本功能;然后由基本模块组成功能部件,实现局部功能;最后由功能部件组成最终的设备。
(二)教学难点
1、 机械结构的调试和优化。
在搭建的过程中先按每一个功能模块来组装,再按模块与模块来组装;要注意构件联接部位的机械强度。每个功能模块装配完成后,先对其单独调试,检查需要活动的机构是否能够灵活运动;所有该紧固之外是否都紧固;机构的活动行程是否满足要求等等。组装过程中,要考虑尽量优化结构。
三、作业
完成实验报告。
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
五、教学后记
实验三 主控制器电路设计实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) Protel DXP2004 简介。
2) 主控制器的原理图绘制。
3) 主控制器的 PCB 图设计。
2、 所需实验器材及配置:
1) 安装有 PROTEL DXP 电路设计软件的计算机 1 台。
3、 讲解实验步骤:
1) 通过 Protel DXP2004 创建一个新工程。
2) 在工程里创建原理图纸,添加集成元件库。
3) 绘制主控制器的原理图。
4) 在工程里创建印制电路板图纸,将原理图的信息导入 PCB 图中。
5) PCB 图中元件布局与电气布线。
(二)教学要求
1、 了解 AVR 单片机及其外围电路;
2、 掌握电路设计的基本过程;
3、 掌握 PROTEL DXP 电路设计软件的使用方法。
二、教学重点、难点
(一)教学重点
1、 通过 Protel DXP2004 绘制主控制器的原理图。
新建一个工程并保存; 添加 CoreBd.IntLib 集成元件库; 准确选择元件库中的元件;绘制过程中,尽量采用快捷键,以提高效率;完成原理图的元件摆放和连接后,要给所有零件进行唯一编号。
2、 印制电路板图(PCB)的布局与电气布线。
元件布局原则起指导作用,并不必须遵守;绘制过程中,尽量采用快捷键,以提高效率;元件布局完成后,一定要用 Keep-Out Layer 绘制电路板的外形, 这就是将来制作出来的电路板实际尺寸;可以手工布线也可以自动布线。
(二)教学难点
1、 原理图(SCH)与印制电路板图(PCB)之间的关系。
SCH 图仅仅表示了原理上的各种电气元件符号及电气连接关系,在 PCB 图才设计实际的电路元件、电气连接、电气布局以及机械尺寸。
三、作业
完成实验报告。
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
五、教学后记
实验四 主控制器编程实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) WinAVR 以及 AVR Studio 软件的使用。
2) 单片机程序的编写与程序烧写文件的生成。
3) PonyProg2000 程序烧写软件以及下载线的使用。
4) 编写单片机串口程序,通过 RS232 总线与计算机通信。
2、 所需实验器材及配置:
1) 安装有 WinAVR+AVR Studio 编译软件的计算机 1 台;
2) 主控制器电路板 1 块;
3) USBisp 下载器 1 个;
4) 12V 电源 1 个;
5) 串口线 1 条。
3、 讲解实验步骤:
1) WinAVR 以及 AVR Studio 软件的安装。
2) 通过 AVR Studio 建立一个工程。
3) 编写一个简单的程序,测试主控制电路板是否工作正常。
4) 将*.hex 文件烧录到单片机中。
5) 编写单片机串口程序,通过 RS232 总线与计算机通信
(二)教学要求
1、 了解单片机程序开发流程;
2、 掌握 WinAVR+AVR Studio 编译环境的使用;
3、 掌握单片机与计算机串口通信方法。
二、教学重点、难点
(一)教学重点
1、 通过 AVR Studio 编写单片机程序。
新建一个工程并保存;正确选择单片机类型;在程序编辑栏中写入相应的程序并保存;按 F7 进行编译并排除错误。
2、 将程序烧录到单片机中。运行 PonyProg2000,选择正确的下载方式(并行下载) ;选择正确的目标芯片;用并口下载线将电脑和主控制器连接,一定要注意线序;程序烧写到主控制器的单片机里,整个过程中不允许断电。
(二)教学难点
1、 主控制器通过 RS232 总线与计算机通信。
测量到的数据以及其他信息通过串口通信方式,传输到计算机,方便观察。单片机的串口参数设置一定要与计算机端的串口调试助手一致,否则无法通信。
三、作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
实验五 模拟信号放大及数字化实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 利用仪表放大器放大微弱信号。
2) 编写单片机 AD 采样程序,将采样值传输到计算机。
3) 利用万用表得到 AD 采样值与实际电压的对应关系。
2、 所需实验器材及配置:
1) 安装有 WinAVR+AVR Studio 编译软件的计算机 1 台;
2) 主控制器电路板 1 块;
3) 仪表放大电路板 1 块;
4) USBisp 下载器 1 个;
5) 12V 电源 1 个;
6) 串口线 1 条;
7) 万用表 1 只;
8) 一字小改刀 1 把。
3、 讲解实验步骤:
1) 使用仪表放大器,将 mV 级弱信号放大 200 倍。
2) 编写单片机 AD 采样程序,通过串口将采样值传输到计算机。
3) 万用表测量放大器输出,改变输入信号,记录万用表读数与单片机AD 采样值。
4) 计算出万用表读数与单片机 AD 采样值的对应关系。
(二)教学要求
1、 了解测试信号数字化处理的基本步骤;
2、 掌握仪表放大电路的使用与调试方法;
3、 掌握单片机 AD 采样方法。
二、教学重点、难点
(一)教学重点
1、 仪表放大器的原理和优点。
仪表放大器主要由两级差分放大器电路构成,前级为同相差分输入,可以提高电路的输入阻抗,且只对差模信号放大,具有很好的共模抑制能力。
2、 单片机的 AD 转换参考电压、位数的概念。
参考电压的大小决定了 AD 转换的最大量程,相当于一把尺子。位数把参考电压分成了若干等分,决定了 AD 转换的最小分辨率。
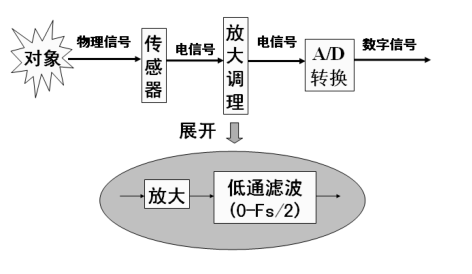
(一)教学难点
3、 测试信号的数字化处理过程。
完成实验报告。
四、参考资料
1、 《 “机电一体化系统创新设计实验”指导书》 ,自编
五、教学后记
实验二 模型机构搭建实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 机构模型的搭建。
2) 机械结构的调试和优化。
2、 所需实验器材及配置:
1) 慧鱼构件若干。
3、 讲解实验步骤:
1) 根据所先命题给出的要求,搭建相应的机构模型。
2) 对机械结构进行调试和优化。
(二)教学要求
1、 了解机械创新设计的过程;
2、 熟悉常用机械构件的种类和使用方法;
3、 熟悉典型传动机构原理及现实方法。
二、教学重点、难点
(一)教学重点
1、 机电设备原理方案的实现。
应进行模块化设计,根据原理方案先搭建各基本模块,实现其基本功能;然后由基本模块组成功能部件,实现局部功能;最后由功能部件组成最终的设备。
(二)教学难点
1、 机械结构的调试和优化。
在搭建的过程中先按每一个功能模块来组装,再按模块与模块来组装;要注意构件联接部位的机械强度。每个功能模块装配完成后,先对其单独调试,检查需要活动的机构是否能够灵活运动;所有该紧固之外是否都紧固;机构的活动行程是否满足要求等等。组装过程中,要考虑尽量优化结构。
三、作业
完成实验报告。
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
五、教学后记
实验三 主控制器电路设计实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) Protel DXP2004 简介。
2) 主控制器的原理图绘制。
3) 主控制器的 PCB 图设计。
2、 所需实验器材及配置:
1) 安装有 PROTEL DXP 电路设计软件的计算机 1 台。
3、 讲解实验步骤:
1) 通过 Protel DXP2004 创建一个新工程。
2) 在工程里创建原理图纸,添加集成元件库。
3) 绘制主控制器的原理图。
4) 在工程里创建印制电路板图纸,将原理图的信息导入 PCB 图中。
5) PCB 图中元件布局与电气布线。
(二)教学要求
1、 了解 AVR 单片机及其外围电路;
2、 掌握电路设计的基本过程;
3、 掌握 PROTEL DXP 电路设计软件的使用方法。
二、教学重点、难点
(一)教学重点
1、 通过 Protel DXP2004 绘制主控制器的原理图。
新建一个工程并保存; 添加 CoreBd.IntLib 集成元件库; 准确选择元件库中的元件;绘制过程中,尽量采用快捷键,以提高效率;完成原理图的元件摆放和连接后,要给所有零件进行唯一编号。
2、 印制电路板图(PCB)的布局与电气布线。
元件布局原则起指导作用,并不必须遵守;绘制过程中,尽量采用快捷键,以提高效率;元件布局完成后,一定要用 Keep-Out Layer 绘制电路板的外形, 这就是将来制作出来的电路板实际尺寸;可以手工布线也可以自动布线。
(二)教学难点
1、 原理图(SCH)与印制电路板图(PCB)之间的关系。
SCH 图仅仅表示了原理上的各种电气元件符号及电气连接关系,在 PCB 图才设计实际的电路元件、电气连接、电气布局以及机械尺寸。
三、作业
完成实验报告。
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
五、教学后记
实验四 主控制器编程实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) WinAVR 以及 AVR Studio 软件的使用。
2) 单片机程序的编写与程序烧写文件的生成。
3) PonyProg2000 程序烧写软件以及下载线的使用。
4) 编写单片机串口程序,通过 RS232 总线与计算机通信。
2、 所需实验器材及配置:
1) 安装有 WinAVR+AVR Studio 编译软件的计算机 1 台;
2) 主控制器电路板 1 块;
3) USBisp 下载器 1 个;
4) 12V 电源 1 个;
5) 串口线 1 条。
3、 讲解实验步骤:
1) WinAVR 以及 AVR Studio 软件的安装。
2) 通过 AVR Studio 建立一个工程。
3) 编写一个简单的程序,测试主控制电路板是否工作正常。
4) 将*.hex 文件烧录到单片机中。
5) 编写单片机串口程序,通过 RS232 总线与计算机通信
(二)教学要求
1、 了解单片机程序开发流程;
2、 掌握 WinAVR+AVR Studio 编译环境的使用;
3、 掌握单片机与计算机串口通信方法。
二、教学重点、难点
(一)教学重点
1、 通过 AVR Studio 编写单片机程序。
新建一个工程并保存;正确选择单片机类型;在程序编辑栏中写入相应的程序并保存;按 F7 进行编译并排除错误。
2、 将程序烧录到单片机中。运行 PonyProg2000,选择正确的下载方式(并行下载) ;选择正确的目标芯片;用并口下载线将电脑和主控制器连接,一定要注意线序;程序烧写到主控制器的单片机里,整个过程中不允许断电。
(二)教学难点
1、 主控制器通过 RS232 总线与计算机通信。
测量到的数据以及其他信息通过串口通信方式,传输到计算机,方便观察。单片机的串口参数设置一定要与计算机端的串口调试助手一致,否则无法通信。
三、作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
实验五 模拟信号放大及数字化实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 利用仪表放大器放大微弱信号。
2) 编写单片机 AD 采样程序,将采样值传输到计算机。
3) 利用万用表得到 AD 采样值与实际电压的对应关系。
2、 所需实验器材及配置:
1) 安装有 WinAVR+AVR Studio 编译软件的计算机 1 台;
2) 主控制器电路板 1 块;
3) 仪表放大电路板 1 块;
4) USBisp 下载器 1 个;
5) 12V 电源 1 个;
6) 串口线 1 条;
7) 万用表 1 只;
8) 一字小改刀 1 把。
3、 讲解实验步骤:
1) 使用仪表放大器,将 mV 级弱信号放大 200 倍。
2) 编写单片机 AD 采样程序,通过串口将采样值传输到计算机。
3) 万用表测量放大器输出,改变输入信号,记录万用表读数与单片机AD 采样值。
4) 计算出万用表读数与单片机 AD 采样值的对应关系。
(二)教学要求
1、 了解测试信号数字化处理的基本步骤;
2、 掌握仪表放大电路的使用与调试方法;
3、 掌握单片机 AD 采样方法。
二、教学重点、难点
(一)教学重点
1、 仪表放大器的原理和优点。
仪表放大器主要由两级差分放大器电路构成,前级为同相差分输入,可以提高电路的输入阻抗,且只对差模信号放大,具有很好的共模抑制能力。
2、 单片机的 AD 转换参考电压、位数的概念。
参考电压的大小决定了 AD 转换的最大量程,相当于一把尺子。位数把参考电压分成了若干等分,决定了 AD 转换的最小分辨率。
(一)教学难点
3、 测试信号的数字化处理过程。
三、作业
完成实验报告。
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
实验六 超声测距电路实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 超声传感器的工作原理及其应用。
2) 编写脉冲电平发生程序,用示波器观察超声回波信号。
3) 编写单片机程序进行超声测距。
2、 所需实验器材及配置:
1) 计算机 1 台;
2) 主控制器电路板和超声回波信号调理电路板 1 块;
3) 串口线 1 条;
4) 12V 电源 1 个;
5) 超声波发射探头、接收探头各 1 只;
6) 示波器 1 台。
3、 讲解实验步骤:
1) 编写程序使主控制器产生一个脉宽小于 25uS 的脉冲电平(TTL) 。
2) 脉冲电平经过主控制器上的 MAX232 转换电平后驱动超声发射探头。
3) 用示波器的探头直接与超声波接收探头联接,观察超声回波信号。
4) 超声波接收探头接入回波信号检测电路,并用示波器观察该电路的输出。
5) 编写单片机程序,对发射探头产生脉冲电平,然后检测回波信号检测电路的输出,同时对此过程计时。
6) 对测量系统进行校准,计算出测量误差。
(二)教学要求
1、 了解超声传感器的工作原理;
2、 掌握超声测距电路的工作原理;
3、 掌握超声测距电路的使用与调试方法。
二、教学重点、难点
(一)教学重点
1、 超声波测距的工作原理及测距原理。
采用的是压电式超声波换能器,利用其正压电效应与逆压电效应来工作。在发射超声波的同时开始计时,超声波在空气中传播,遇到障碍物就立即返回来,接收器收到反射波就立即停止计时。根据计时器记录的时间和超声波在空气中的传播速度,可以计算出发射点距障碍物的距离。
2、 单片机的计时程序。
单片机发出脉冲的同时,立即开启计数器;当检测到回波时,马上读取当前的计数值,然后算出时间差。每次使用完计数器后,一定要先关闭,后清零。
(二)教学难点
1、 超声波回波信号检测电路的工作原理。
回波信号经过由两级放大器组成的交流信号放大电路,然后传送到电压比较器与一个参考电平进行比较,当信号电压值大于此参考电平,就意味着收到了回波,这就是过电平检测。
三、 作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
实验七 执行器控制电路实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) PWM 方式控制电机转速的原理。
2) 单片机产生 PWM 信号的方法。
3) H 桥电机驱动电路的原理与应用。
4) 电磁阀和电磁铁的控制方法。
2、 所需实验器材及配置:
1) 计算机 1 台;
2) 主控制器电路板 1 块;
3) 执行器控制电路板 1 块;
4) 串口线 1 条;
5) 12V 电源 1 个;
6) 直流电动机 1 只;
7) 电磁阀 1 只;
8) 示波器 1 台。
3、 讲解实验步骤:
1) 编写程序使主控制器产生一个 PWM 信号。
2) PWM 信号通过 H 桥电路放大功率后,驱动电动机。
3) 通过程序改变电动机的转动速度和转动方向。
4) 编写程序控制电磁阀和电磁铁。
(二)教学要求
1、 了解机电设备中执行器的种类;
2、 掌握典型执行器的驱动方式;
3、 掌握直流电动机的调速方法。
二、教学重点、难点
(一)教学重点
1、 PWM 方式控制电机转速的原理。
在 PWM 驱动控制的调整系统中,按一个固定的频率来“接通”和“断开”电源,并根据需要改变一个周期中“接通”和“断开”时间的长短。通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速快慢。
2、 H 桥电路控制电机转向。
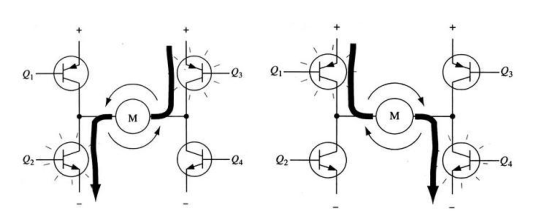
H 桥电路原理
(二)教学难点
3、 单片机产生 PWM 信号的方法。
可以利用单片机的定时器功能,使其产生一定频率的中断,在中断处理程序中,判断是否需要将相应引脚置为高电平或低电平。也可以利用 AVR 单片机提供的比较匹配功能,输出引脚产生 PWM 信号。
三、作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
实验八 系统综合调试实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 完成机电一体化系统测试传感部分的搭建。
2) 完成机电系统的控制及信息处理部分。
3) 编写控制程序实现命题所指定的动作和功能。
2、 所需实验器材及配置:
1) 慧鱼构件若干;
2) 安装有 WinAVR+AVR Studio 编译软件的计算机 1 台;
3) 主控制器电路板 1 块;
4) USBisp 下载器 1 个;
5) 12V 电源 1 个;
6) 串口线 1 条;
7) 仪表放大电路板 1 块;
8) 超声回波信号调理电路板 1 块;
9) 执行器控制电路板 1 块。
3、 讲解实验步骤:
1) 搭建完整的机电一体化系统。
2) 将机电设备模型上的执行器与传感器接入相应的电路模块。
3) 编写程序控制机电设备模型运动。
4) 对机械、电气与控制程序设计进行综合优化。
(二)教学要求
1、 了解机电一体化系统的调试步骤;
2、 掌握机电设备的控制及运动规划方法;
3、 掌握机电一体化系统的调试方法。
二、教学重点、难点
(一)教学重点
1、 传感器的类型。
传感器通常有两种输出形式:开关量和模拟量。开关量是指非连续性信号,它有 1 和 0 两种状态。模拟量是指变量在一定范围连续变化的量,也就是在一定范围(定义域)内可以取任意值。
2、 执行器的控制方式。
通断型和可调型。无转速要求的电机等只需要通电或断电的用电器,属于通断型,可接到达林顿管 UNL2803 的输出引脚。如果需要调速的电机,那么只能接到 H 桥芯片 L298N 的输出引脚上。
(二)教学难点
1、 控制程序的编写。
先要规划好机电设备的动作流程,然后画出简单的程序流程图,最后才编写实际代码。
三、作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
3、 单片机产生 PWM 信号的方法。
可以利用单片机的定时器功能,使其产生一定频率的中断,在中断处理程序中,判断是否需要将相应引脚置为高电平或低电平。也可以利用 AVR 单片机提供的比较匹配功能,输出引脚产生 PWM 信号。
三、作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
实验八 系统综合调试实验(4 学时)
一、教学内容及要求
(一)教学内容
1、 介绍实验内容:
1) 完成机电一体化系统测试传感部分的搭建。
2) 完成机电系统的控制及信息处理部分。
3) 编写控制程序实现命题所指定的动作和功能。
2、 所需实验器材及配置:
1) 慧鱼构件若干;
2) 安装有 WinAVR+AVR Studio 编译软件的计算机 1 台;
3) 主控制器电路板 1 块;
4) USBisp 下载器 1 个;
5) 12V 电源 1 个;
6) 串口线 1 条;
7) 仪表放大电路板 1 块;
8) 超声回波信号调理电路板 1 块;
9) 执行器控制电路板 1 块。
3、 讲解实验步骤:
1) 搭建完整的机电一体化系统。
2) 将机电设备模型上的执行器与传感器接入相应的电路模块。
3) 编写程序控制机电设备模型运动。
4) 对机械、电气与控制程序设计进行综合优化。
(二)教学要求
1、 了解机电一体化系统的调试步骤;
2、 掌握机电设备的控制及运动规划方法;
3、 掌握机电一体化系统的调试方法。
二、教学重点、难点
(一)教学重点
1、 传感器的类型。
传感器通常有两种输出形式:开关量和模拟量。开关量是指非连续性信号,它有 1 和 0 两种状态。模拟量是指变量在一定范围连续变化的量,也就是在一定范围(定义域)内可以取任意值。
2、 执行器的控制方式。
通断型和可调型。无转速要求的电机等只需要通电或断电的用电器,属于通断型,可接到达林顿管 UNL2803 的输出引脚。如果需要调速的电机,那么只能接到 H 桥芯片 L298N 的输出引脚上。
(二)教学难点
1、 控制程序的编写。
先要规划好机电设备的动作流程,然后画出简单的程序流程图,最后才编写实际代码。
三、作业
完成实验报告
四、参考资料
1、 《“机电一体化系统创新设计实验”指导书》 ,自编
2、 《C 语言核心技术》 ,Peter Prinz,Tony Crawford 编著,机械工业出版社,2007 年
五、教学后记
Copyright © 电子科技大学机电与控制工程实验教学中心 All Rights Reserved 电话:028-61830224 地址:成都市高新西区天润路888号 蜀ICP备15021327号  川公网安备 51010802000136号
技术支持:顶呱呱集团
川公网安备 51010802000136号
技术支持:顶呱呱集团
相关链接推荐: 电子科技大学 | 电子科大教务处 | 电子科技大学机械与电气工程学院 | 电子科技大学自动化工程学院 | 在线图书馆
川公网安备 51010802000136号
技术支持:顶呱呱集团相关链接推荐: 电子科技大学 | 电子科大教务处 | 电子科技大学机械与电气工程学院 | 电子科技大学自动化工程学院 | 在线图书馆